MOD 我的世界鼠标手势MOD下载 这个mod让你的操作更加便捷和流畅,使合成更简单。 目前1.7.2版本的鼠标手势必须要有Forge才能安装。 介绍 以下所有功能都可以在配置文件.minecraft... 2016年11月16日 阅读 6,080 views 发表评论 阅读全文
MOD 我的世界农场物语2MOD下载 你是否想念当初风靡一时的QQ农场?农场物语2MOD让你重温经典。 ——模组介绍—— 该模组添加了一些作物和种植的田地以及一些加工用的机器,最重要的还是出货系统玩家可... 2016年11月16日 阅读 2,694 views 发表评论 阅读全文
MOD 通往异次元的大门 我的世界次元门MOD下载 次元门模组可以让玩家在游戏中创建出通往异世界断片的次元门,大多数的异次元都不大但都有宝箱。除了自然生成的异次元外玩家还可以自己创建属于自己的口袋次元 ... 2016年11月16日 阅读 7,800 views 发表评论 阅读全文
MOD 我的世界输入修复 中文输入MOD下载 着力于修复Minecraft无法正常输入中文的bug的补丁类模组。 包含对官方环境,forge环境,bukkit环境以及mcpc+环境下适用的各版本的输入修正 解锁... 2016年11月16日 阅读 7,501 views 发表评论 阅读全文
MOD 我的世界机器方块MOD下载 机器方块模组让玩家可以发挥自己的想象建造机器人和各种大型机械装置,例如坦克。这些东西都可驾驶,还能装备武器。 ——模组介绍—— 图上是我自己建造的一个... 2016年11月16日 阅读 9,302 views 发表评论 阅读全文
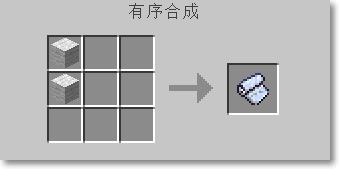
MOD 让合成更便捷 我的世界便捷合成MOD下载 便捷合成mod 是一个物品辅助类模组,添加了合成方式,为原版里无法通过合成获得的东西,譬如马铠、鞍、命名牌、链甲等。玩家还能去掉有色羊毛和玻璃的颜色、把羊毛变成线、... 2016年11月16日 阅读 4,211 views 发表评论 阅读全文
MOD 过上牧民的生活 我的世界游牧帐篷MOD下载 游牧帐篷mod 是一个添加物品型模组,添加了添加了游牧部落风格的帐篷,帐篷里是另外一个世界,且可以在帐篷内存放东西。 ——模组使用方法—— =====合成基础物品↓... 2016年11月16日 阅读 2,388 views 发表评论 阅读全文
MOD 攻坚高塔,SAO?我的世界战斗高塔MOD下载 战斗高塔是一个简单暴力的模组,它可以生成出一些有怪物以及宝箱的高塔,最顶端有镇守的BOSS可以打,越往上宝箱的东西越好 ——模组介绍—— 该模组生成的高塔是这样的 ... 2016年11月16日 阅读 2,964 views 发表评论 阅读全文
MOD 想进入神话吗?我的世界神话生物MOD下载 神话生物mod 增加了很多神奇的生物,譬如很多神话中的生物,和游戏动画小马宝莉里的生物等等。 ——模组介绍—— 添加很多新的方块,有各种奇妙的功能↓ 添加了大量的神... 2016年11月16日 阅读 7,080 views 发表评论 阅读全文
MOD 妈妈再也不用担心我夜间看不见了 我的世界夜视头盔MOD下载 夜视头盔mod 在游戏里添加了铁质夜视头盔、金质夜视头盔、钻石夜视头盔三种夜视头盔,合成方法很简单,而且装备后可以永久获得夜视的效果,在游戏里不管是夜晚还是下海、挖... 2016年11月16日 阅读 2,113 views 发表评论 阅读全文
 MOD
MOD
MOD
MOD
 MOD
MOD
 MOD
MOD
 MOD
MOD
 MOD
MOD
 MOD
MOD
 MOD
MOD
MOD
MOD
 MOD
MOD
 MOD
MOD